Learn about the ground breaking technology to map pedestrian and street infrastructure at a massive scale for the entire State of Washington. Pedestrian Routing Infrastructure and Street Mapping (PRISM) is developed to solve the challenging task of mapping the missing key link in a complete street and transportation analysis: pedestrian network including sidewalks, crossings and curbs.

Motivation
Pedestrian infrastructure plays a critical role in urban mobility, accessibility, and safety. However, while road network data is widely available, comprehensive pedestrian pathway data—including sidewalks and crossings—remains scarce. Only 5 of the top 10 populated cities in the US have sidewalks datasets in their open data portals. This gap limits the ability of cities, planners, and mobility service providers to analyze walkability, optimize pedestrian navigation, and improve urban infrastructure. Manual creation of pedestrian infrastructure datasets in a consistent graph connected format is extremely laborious and costly.
To address this challenge, we have developed Pedestrian Routing Infrastructure and Street Mapping (PRISM), a scalable AI solution leveraging the advances in computer vision and Artificial Intelligence techniques to create a detailed, city-scale pedestrian network by using the existing road data, and high-resolution aerial imagery. The result is an accurate, scalable, and data-rich representation of pedestrian infrastructure that can support urban planning, accessibility analysis, and navigation applications.
Overview
The following figure shows our solution at a high level.

Figure 1: High Level Architecture of PRISM-AI
The solution comprises three steps: graph hypothesis, custom aerial image segmentation, and fusion and optimization to obtain the final connected pedestrian pathways network. Below we explain each of the steps in our approach briefly.
Graph Hypothesis
Even though pedestrian pathway data is often unavailable or incomplete, the road network data is widely available. We leverage this fact and use the existing road networks to infer a hypothesized pedestrian path network. Our approach requires only a street network dataset—typically sourced from OpenStreetMap or from the local transportation departments —to estimate full intersection-to-intersection sidewalk paths and generate street crossing pathways. This connected graph forms the proposed dataset which we enrich, fix and optimize in the subsequent steps.
Inferring Pedestrian Network using Advanced Computer Vision
Hypothesized network acts as a guide but is not representative of the ground truth. To refine the hypothesized pathway network, we deploy state-of-the-art computer vision models. Our custom-built semantic segmentation models generate pixel-level predictions for sidewalks, crossings, and other key pedestrian infrastructure. These models are trained on a dataset curated in-house, consisting of high-resolution aerial imagery, rasterized street networks, and human-annotated ground truth data.

Figure 2: Segmentation output from the aerial imagery
Fusion and Optimization
We fuse the topology data from the hypothesized pedestrian network with insights gained from our computer vision models to optimize the placement and connectivity of sidewalks and crossings. By utilizing our high-confidence predictions, we refine the hypothesized network into a precisely mapped pedestrian pathway graph that accurately represents real-world infrastructure focussing on connectivity.
The output of our solution is a detailed connected graph dataset. An example overlayed on the aerial imagery is shown in the following figure.
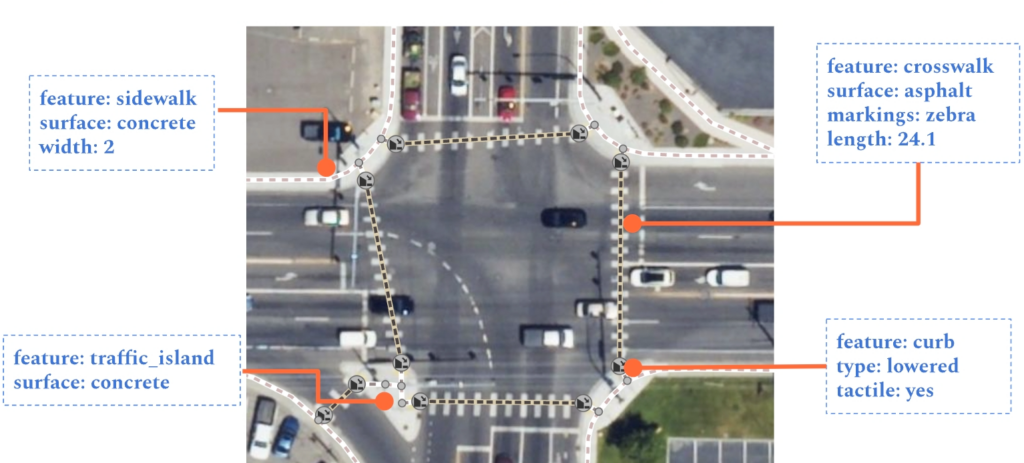
Figure 3: Detailed intersection output of PRISM-AI
Scalability
No solution is good if it cannot scale. Our end-to-end pipeline is fully automated, enabling large-scale pathway data generation without manual intervention. It produces standardized output in sidewalk centerline format, ready to use directly in many applications including uploading it to OpenStreetMap. The computer vision models are trained on our diverse dataset encompassing multiple cities, suburban, and rural built environments, ensuring robust performance across different geographies. Our work with the University of Washington’s TCAT to generate Unified Sidewalks datasets for the State of Washington is a proof our scalability.
See our solution drive applications like TDEI viewer, and AccessMap
Need pedestrian infrastructure mapped in your city, county or state? Reach out to us and lets get mapping.